

Protocol to Study Spatial Subgoal Learning Using Escape Behavior in Mice
利用逃逸行为研究小鼠空间子目标学习的方案
发布: 2022年06月20日第12卷第12期 DOI: 10.21769/BioProtoc.4443 浏览次数: 2623
评审: Eleonore DuvelleThomas Jahans-PriceAnonymous reviewer(s)
参见作者原研究论文
The authors used this protocol in:
Jul 2021
Advertisement










Abstract
Rodent spatial navigation is a key model system for studying mammalian cognition and its neural mechanisms. Of particular interest is how animals memorize the structure of their environments and compute multi-step routes to a goal. Previous work on multi-step spatial reasoning has generally involved placing rodents at the start of a maze until they learn to navigate to a reward without making wrong turns. It thus remains poorly understood how animals rapidly learn about the structure of naturalistic open environments with goals and obstacles. Here we present an assay in which mice spontaneously memorize two-step routes in an environment with a shelter and an obstacle. We allow the mice to explore this environment for 20 min, and then we remove the obstacle. We then present auditory threat stimuli, causing the mouse to escape to the shelter. Finally, we record each escape route and measure whether it targets the shelter directly (a ‘homing-vector’ escape) or instead targets the location where the obstacle edge was formerly located (an ‘edge-vector’ escape). Since the obstacle is no longer there, these obstacle-edge-directed escape routes provide evidence that the mouse has memorized a subgoal location,i.e., a waypoint targeted in order to efficiently get to the shelter in the presence of an obstacle. By taking advantage of instinctive escape responses, this assay probes a multi-step spatial memory that is learned in a single session without pretraining. The subgoal learning phenomenon it generates can be useful not only for researchers working on navigation and instinctive behavior, but also for neuroscientists studying the neural basis of multi-step spatial reasoning.
Keywords: Spatial memory (空间记忆)Background
In previous work, rodent escape behavior has been used to study goal-directed spatial navigation in the context of obstacle-free environments. In the standard Barnes Maze assay (Barnes, 1979; Harrison et al., 2006), rodents are placed in an open-field arena with an underground shelter and presented with an ongoing aversive stimulus such as a bright light. Rodents locate the enclosed space in the environment (the shelter), instinctively adopt it as their home base, and run to it when faced with threatening stimuli such as loud sounds. Over multiple sessions, animals learn to navigate efficiently to the shelter using spatial memory. Work from our laboratory has provided three updates to this protocol (Vale et al., 2017, 2018): the learning period and escape testing all occur within a single session; the mouse’s self-motivated exploratory behavior proceeds without having to remove the mouse from the arena; and sudden-onset threat stimuli are used to evoke robust, shelter-directed escape paths. Our new protocol builds on that assay by adding (and dynamically modifying) structure in the environment. In this environment with an obstacle, mice learn a hierarchy of goals: the ultimate goal (the shelter) and two subgoal locations (the sides of the obstacle) that the animal uses to plan efficient routes to the ultimate goal. Thus, our protocol can allow researchers to investigate how animals rapidly learn multi-step routes to a shelter during a single session of self-motivated exploration.
Unlike this approach, prior work on multi-step spatial reasoning has focused on repeatedly placing an animal at the start of a constrained maze environment and testing how it learns to reach a food reward while minimizing erroneous turns (Tolman and Honzik, 1930; Sharma et al., 2010). These assays have several advantages: they assess long-term memory over multiple sessions/days; they induce stereotyped paths across animals; and they rely on a particularly stable and controllable source of motivation,i.e., hunger. However, they also leave out several key aspects of spatial reasoning. For one, they disregard how animals explore and rapidly compute routes in natural environments, which include both open space (allowing a much wider range of possible actions) and obstacles (necessitating multi-step reasoning). In addition, they lack a stimulus that can trigger immediate, goal-directed behavior. Thus, it is unclear if the animal’s ‘errors’ reflect a lack of understanding or merely a decision not to exploit a known route to the goal. Our assay—escape to shelter in the presence of obstacles—complements previous work on maze learning by incorporating these elements into the study of multi-step route learning.
Finally, escape to shelter in the presence of obstacles has been studied before, with gerbils (Ellard and Eller, 2009). Our protocol differs from this work primarily in its methods for evoking immediate and robust escape responses, ruling out visual-guided strategies, and quantitatively measuring subgoal learning. Our protocol was initially developed in Shamash et al. (2021) and then improved upon in Shamash and Branco (2021), which includes the automated threat presentation and removable obstacle panel features described below.
Materials and Reagents
Paper towels
C57BL/6J adult male or female mice, purchased from Charles River, 8–12 weeks of age. Animals were tested during the light phase of a 12-h light/dark cycle and had been singly housed for ≥5 days by the time of testing (see Note 1). No pretraining or habituation is necessary.
70% ethanol
Equipment
Behavioral arenas
A 92 cm diameter circular arena, made of 5 mm thick white acrylic, with a 10 cm × 50 cm rectangular hole cut from the middle; and a similar 92 cm diameter circular arena without a hole in it, to be placed beneath the platform with the hole ( Figure 1 ).
Panel with obstacle
50 cm long × 10 cm wide panel with a 50 cm-long × 12.5 cm tall obstacle attached along the central axis, made of 5 mm thick white acrylic (Figure 1).
Flat panel
An identical 50 cm long × 10 cm wide panel (Figure 1B).
Stand to support the elevated behavioral arena, ≥20 cm tall
The stand should stably support the 92 cm diameter arena without sticking out beyond the perimeter of the arena. For example, a 62.5 cm cubic base would work (igure 1A).
Shelter
10 cm long × 10 cm wide × 15 cm tall cube of transparent red acrylic (opaque to the mouse). It includes a mouse-hole-shaped entrance at the front (Figure 1).
Video camera
acA1300-60gmNIR, Basler, with a near-infrared selective filter, positioned 1 m above the behavioral arena (Figure 1A).
Amplifier (Topaz AM10, Cambridge Audio) and speaker (L60, Pettersson) hooked up to the computer used to control the experiment.
Infrared LED illuminators (TV6700, Abus; 850 nm light) distributed above the platform for infrared video recording (we use six illuminators).
Sound level meter (Castle GA213)
Auditory stimulus sound files (Supplementary Audio 1-2). Two sounds were downloaded from soundbible.com (‘smashing’ and ‘crackling fireplace’). They were then edited manually in Audacity 2.3.0, such that they were 1.5 s long and continuously loud.
Recommended: Infrared LED (850 nm OSLON PowerStar IR LED), hooked up to the auditory threat signal coming from the amplifier and therefore flashing infrared light toward the video camera whenever an auditory stimulus occurs.
Optional : A large, sound-proof box (160 cm wide × 165 cm deep × 190 cm tall). Alternatively, surround the arena with any dark material such as thin black plastic, at least 30 cm above the height of the arena, to make the environment less exposed and so less stressful for the mice.
Optional: Projector (BenQ) and projector screen (Xerox). We used a projector to illuminate the arena, because we also perform experiments with visual stimuli in the same arena. However, illuminating the arena with a lamp should be sufficient. During experiments, the screen was illuminated with uniform, gray light at 5 cd m-2 (this measures the incoming light from the projector coming onto the projector screen). A rectangular hole was cut in the projector screen, and the video camera and speaker were placed just above this hole, 1 m above the center of the behavioral arena.
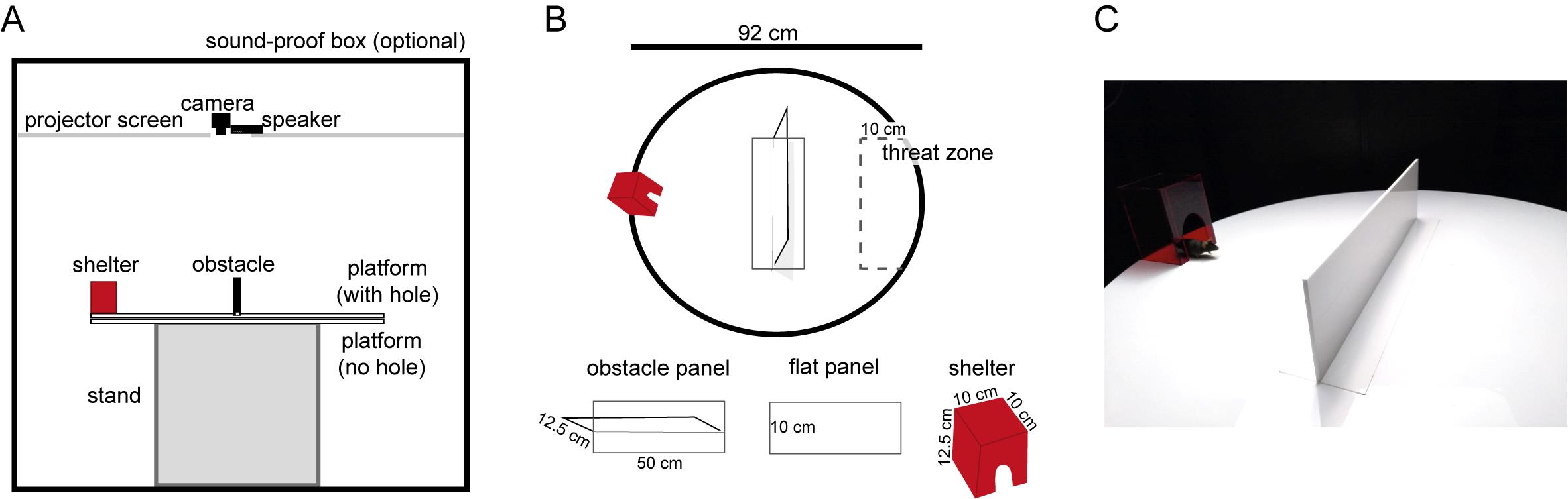
Figure 1. Shelter + obstacle environment. A. Schematic of the relative positions of the equipment used to build and record from the shelter + obstacle environment. B. Top view of the behavioral arena. During the obstacle removal experiment, the obstacle panel is replaced with the flat panel, by the experimenter. The suggested threat zone (not visibly marked on the actual platform) is 50 cm long and extends 15 cm from rightmost point of the platform. C. Picture of the platform with the obstacle panel in place and the mouse peeking out of the shelter.
Software
Video recording and automated stimulus presentation program, written using Bonsai 2.4.1. Online mouse tracking was based on the mouse being darker than the white acrylic platform (sample code available at github.com/philshams/bonsai-behavior).
Post-hoc animal tracking, DeepLabCut (Mathis et al. , 2018)
Procedure
文章信息
版权信息
© 2022 The Authors; exclusive licensee Bio-protocol LLC.
如何引用
Shamash, P. and Branco, T. (2022). Protocol to Study Spatial Subgoal Learning Using Escape Behavior in Mice. Bio-protocol 12(12): e4443. DOI: 10.21769/BioProtoc.4443.
分类
神经科学 > 行为神经科学 > 学习和记忆
生物科学 > 生物技术
您对这篇实验方法有问题吗?
在此处发布您的问题,我们将邀请本文作者来回答。同时,我们会将您的问题发布到Bio-protocol Exchange,以便寻求社区成员的帮助。